 MB Matheblog # 28
MB Matheblog # 28previous article next article
index website
| MB Matheblog # 28 |
blog overview previous article next article |
main page index website |
| 2023-08-14 |  deutsche Version deutsche Version |
|
|
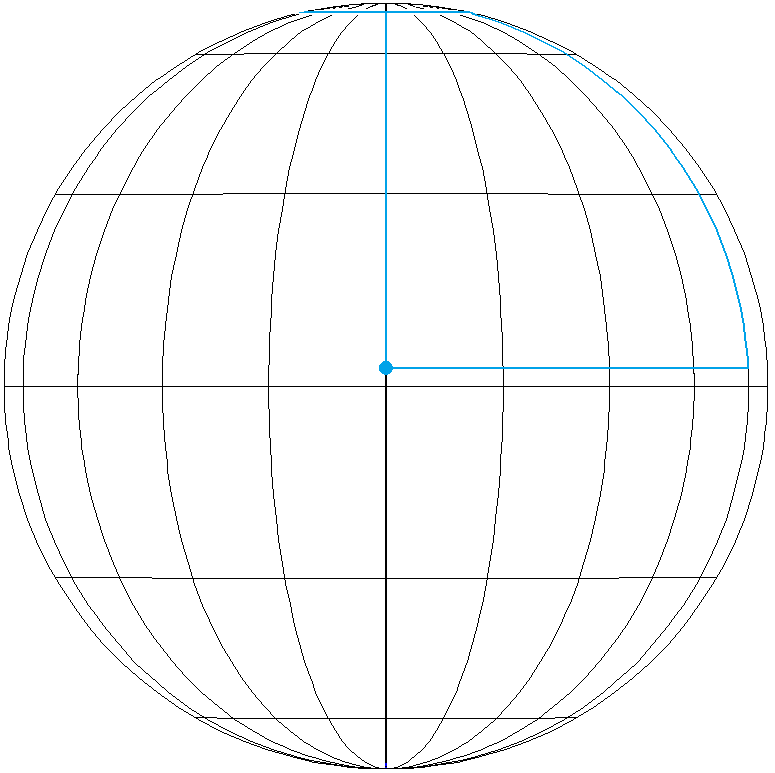
First solution ("equator solution") : \(~k=0\)
(4) gives \(~\phi = 0~\). The drone starts south of the equator on latitude \(~-d_~\). \(k = 0~\) means \(~k_1 = k_2~\). The drone performs an equal number of complete circuits on north and south stages. |
|
Example 1: Stage length \(~800~\text{km}_~\).
\(~d~\approx~3,5973°~~\widehat{=}~~400~\text{km}\) Once again: the degree-measurement is valid for a great circle, in our setting for the first and the third stage. It does not refer to the longitudes along the north and the south stage. Along the north and the south circle – going east resp. west – \(~2_~d/\text{cos}~(\pm d)~\approx~7,2088°\) (longitude) is covered, with \(~k_1 = k_2=0~\). |
|
Example 2: Stage length \(~18000~\text{km}_~\).
\(~d~\approx~80,9393°~~\widehat{=}~~9000~\text{km}\) Along the north and the south circle \(~2_~d/\text{cos}~(\pm d)~\approx~1027,926°~=~2 \cdot 360°+307,926°\) (longitude) is covered, with \(~k_1 = k_2=2_~\). |
|
Second solution ("north solution") : \(~k \gt 0\)
\(k_1 \gt k_2~\), hence the north circle sees more complete circuits by the drone than the south circle und is therefore the shorter one. This means \(~\phi \gt 0~\). So in (5) only the "+"-solution has to be considered. |
|
Example 3: Stage length \(~2000~\text{km}_~\), with \(~k=2_~\).
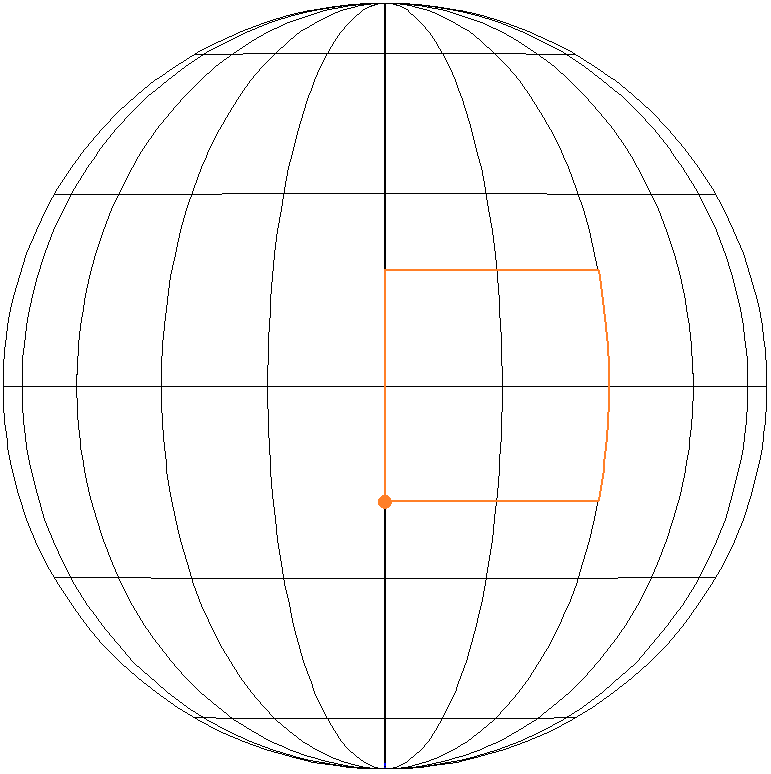
\(~d~\approx~8,9933°~~\widehat{=}~~1000~\text{km}\) \(\phi~\approx~79,6758°\) The drone starts on latitude \(70,6825°\). First stage, going north, to latitude \(~88,6691°\). Second stage (north stage) to the east covering \(~2_~d/\text{cos}~(\phi + d)~\approx~774,372°~=~2 \cdot 360°+54,372°\) (longitude) with \(~k_1 = 2~\). Third stage, going south, to latitude \(70,6825°\). Fourth stage (south stage) to the west covering \(~2_~d/\text{cos}~(\phi - d)~\approx~54,372°\) (longitude) with \(~k_2 = 0~\). |
|
Example 4: Stage length \(~16250~\text{km}_~\), with \(~k=1_~\).
\(~d~\approx~73,0702°~~\widehat{=}~~8125~\text{km}\) \(\phi~\approx~5,5693°\) The drone starts on latitude \(-67,5009°\). First stage, going north, to latitude \(78,6395°\). Second stage (north stage) to the east covering \(~2_~d/\text{cos}~(\phi + d)~\approx~741,898°~=~2 \cdot 360°+21,898°\) (longitude) with \(~k_1 = 2~\). Third stage, going south, to latitude \(-67,5009°\). Fourth stage (south stage) to the west covering \(~2_~d/\text{cos}~(\phi - d)~\approx~381,898°~=~360°~+~21,898°\) (longitude) with \(~k_2 = 1~\). |
|
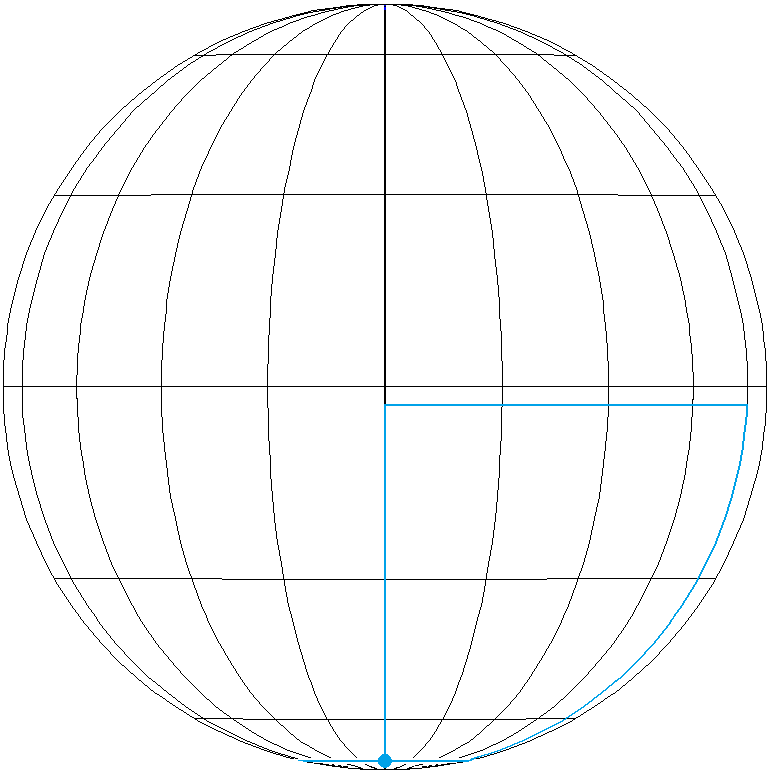
Third solution ("south solution") : \(~k \lt 0\)
\(k_1 \lt k_2~\), hence the sourth circle sees more complete circuits by the drone than the north circle und is therefore the shorter one. This means \(~\phi \lt 0~\). So in (5) only the "–"-solution has to be considered. — The second and the third solution are located symmetrically to the equator. |
|
Example 5 (cf. Ex. 3): Stage length \(~2000~\text{km}_~\), with \(~k=-2_~\).
\(~d~\approx~8,99326°~~\widehat{=}~~1000~\text{km}\) \(\phi~\approx~-79,6758°\) The drone starts on latitude \(-88,6691°\). First stage, going north, to latitude \(-70,6825°\). Second stage (north stage) to the east covering \(~2_~d/\text{cos}~(\phi + d)~\approx~54,372°\) (longitude) with \(~k_1 = 0_~\). Third stage, going south, to latitude \(-88,6691°\). Fourth stage (south stage) to the west covering \(~2_~d/\text{cos}~(\phi - d)~\approx~774,372°~=~2 \cdot 360°+54,372°\) (longitude) with \(~k_2 = 2~\). |
| k1 k2 | 1 | 2 | 3 | 4 | 5 | limit |
| 1 | 67,8541° | 72,3525° | 73,9385° | 74,7517° | 75,2467° | 77,2863° |
| 2 | 72,3525° | 77,5586° | 79,4014° | 80,3482° | 80,9253° | 83,3098° |
| 3 | 73,9385° | 79,4014° | 81,3369° | 82,3320° | 82,9387° | 85,4477° |
| 4 | 74,7517° | 80,3482° | 82,3320° | 83,3521° | 83,9743° | 86,5480° |
| 5 | 75,2467° | 80,9253° | 82,9387° | 83,9743° | 84,6059° | 87,2194° |
| limit | 77,2863° | 83,3098° | 85,4477° | 86,5480° | 87,2194° | 90° |
Conclusions
|
[1] Alfred Posamentier, Wolfgang Schulz: The Art of Problem Solving: A Resource for the Mathematics Teacher, Corvin 1996; ch. "Symmetry Saves the Solution", section "Square Hunting"
Last update 2022-07-25
blog overview | previous article | next article