 MB Matheblog # 33
MB Matheblog # 33voriger Eintrag nächster Eintrag
Index der gesamten Website
| MB Matheblog # 33 |
Inhalt Blog voriger Eintrag nächster Eintrag |
zur Leitseite Index der gesamten Website |
|
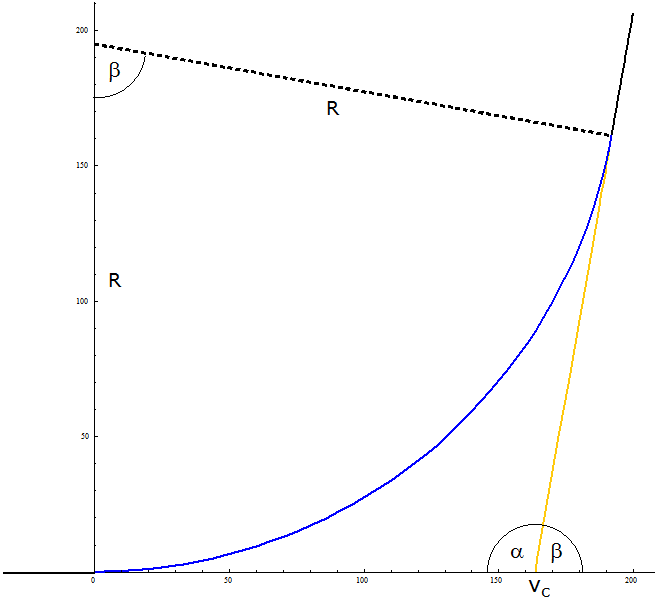
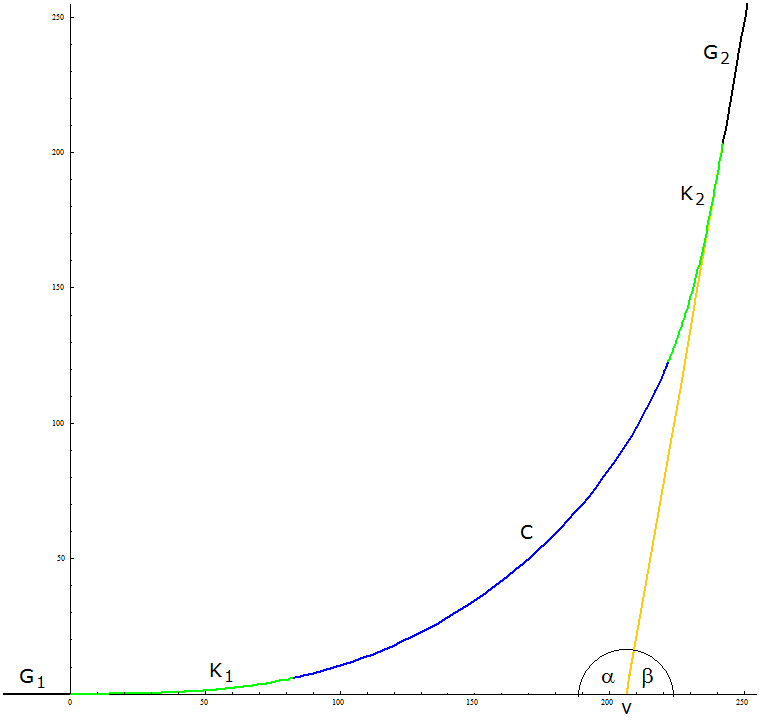
Trassenberechnung für den Kreisbogen Eingabe: \(~\alpha~\) Winkel zwischen den Geraden \(~R~\) Kreisradius Parametrisierung für den Kreis (Gegenuhrzeigersinn; Start in \((0,0))\) : \[(x,~y)=(R~\text{sin}~t,~R-R~\text{cos}~t)~~~~~~~~t~\in~(0,~\beta)~~~~\text{mit}~~~\beta = 180°-\alpha\] (1) Fußpunkt der zweiten Geraden: \(~v_c=R~\text{cot}~\alpha/2\) Übergang vom Kreisbogen in zweite Gerade: \((x,~y)=(R~\text{sin}~\beta,~R-R~\text{cos}~\beta)\) |
|
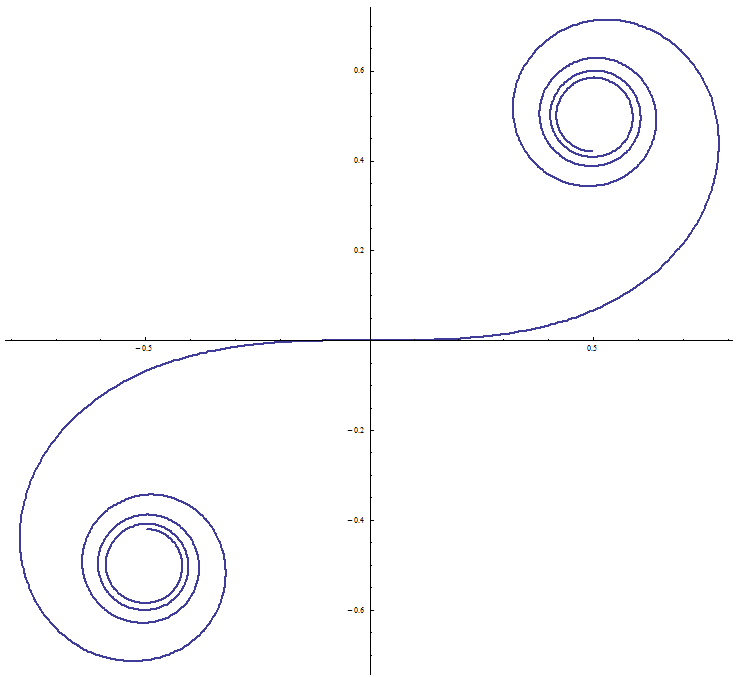
Klothoide \[(x,~y)=(x(l),~y(l))=a~\sqrt{\pi}~\left(f_c\left(\frac{l}{a~\sqrt{\pi}}\right),~f_s\left(\frac{l}{a~\sqrt{\pi}}\right)\right)~~~~~~~l \in \textbf{R}\] Eigenschaften:
Zur numerischen Evaluation der Klothoide benutzte man früher Tabellenwerke, heute verwendet man in der Regel ein Programm. Sie lässt sich beispielsweise mit Mathematica leicht mittels \(f_c(u)=\) FresnelC[u], \(~f_s(u)=\) FresnelS[u] berechnen. Man kann aber auch die sehr schnell konvergierenden Potenzreihen verwenden: \[x(l)=l \cdot \sum_{n=0}^\infty (-1)^n~\frac{(l/a)^{4n}}{(2n)!~(4n+1)~4^n}\] Nenner 1 40 3.456 599.040 175.472.640 ... \[y(l)=\frac{l}{2} \cdot \sum_{n=0}^\infty (-1)^n~\frac{(l/a)^{4n+2}}{(2n+1)!~(4n+3)~4^n}\] Nenner 3 168 21.120 4.838.400 1.765.048.320 ... Zur schnellen Konvergenz trägt bei, dass in den Anwendungen (siehe nächster Abschnitt) \(~l/a < 1~\) ist. |
|
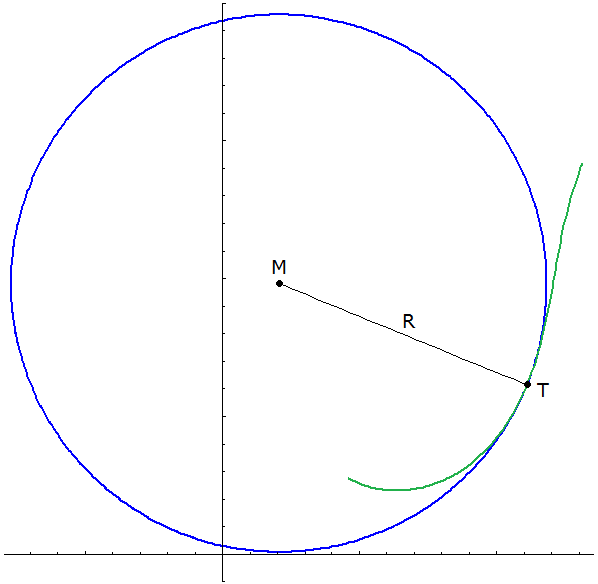
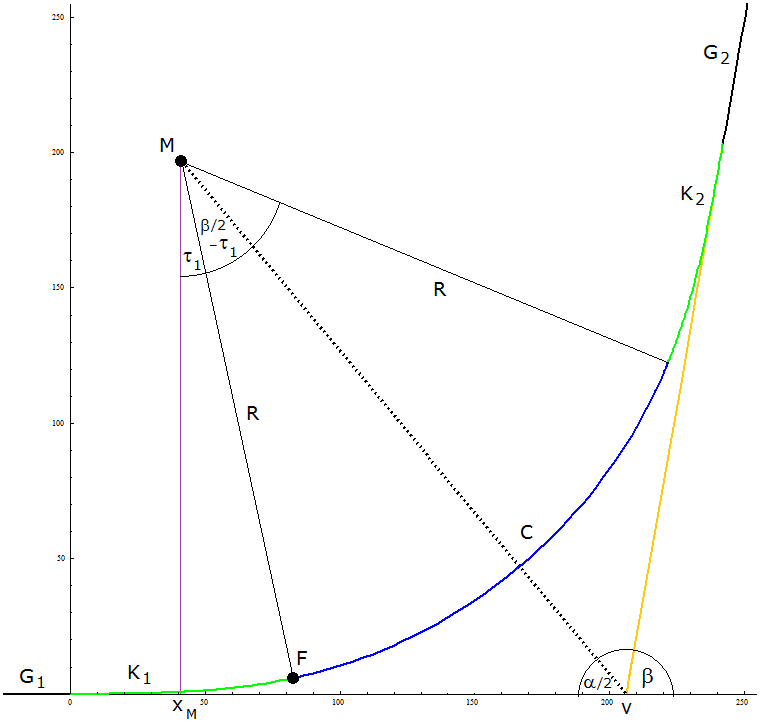
Berechnung der Kurve Klothoide - Kreisbogen - Klothoide (siehe Bild 4) Eingabe: \(~\alpha~\) Winkel zwischen den Geraden Eingabe: \(~R~\) Kreisradius Eingabe: \(~L~\) Länge eines Klothoidenabschnitts zwischen Gerade und Kreis Beim Übergang Klothoide - Kreis stimmen die Tangenten überein, da es sich um den Krümmungskreis am Ende der Klothoide handelt. Die Klothoidenkrümmung beträgt nach (5) \(~L/a^2~\), die Kreiskrümmung \(~1/R~\). Diese Krümmungen müssen übereinstimmen. Daraus ergibt sich, welcher Faktor \(~a~\) in (2) bei der Klothoide eingesetzt werden muss: \[\textbf{(7)}~~~a=\sqrt{L\cdot R}\] \[\textbf{(8)}~~~~~~\rightarrow~~~K_1~:~~(x_1(l),~y_1(l))=\sqrt{\pi\cdot L\cdot R}~\left(f_c\left(\frac{l}{\sqrt{\pi\cdot L\cdot R}}\right),~f_s\left(\frac{l}{\sqrt{\pi\cdot L\cdot R}}\right)\right)~~~~~~~l \in (0,~L)\] Die Parametrisierung des Kreises soll im Gegenuhrzeigersinn erfolgen und mit Tiefpunkt bei \(~t=0~\): \[\textbf{(9)}~~~C~:~~(x_c(t),~y_c(t))=(x_M+R~\text{sin}~t,~y_M-R~\text{cos}~t)~~~~~~~t \in [~\tau_1,~\tau_2~]\] Hierfür sollen im Folgenden das Definitionsintervall \(~[~\tau_1,~\tau_2~]~\) für den Parameter \(~t~\) sowie der Kreismittelpunkt \(~M=(x_M,~y_M)\) bestimmt werden. Steigungswinkel im Punkt \(~F~\) beim Übergang \(~K_1 - C~\) nach (6), (7): \[\textbf{(10)}~~~\tau_1= \frac{L^2}{2~a^2}= \frac{L}{2~R}\] \(t=\tau_1~\) ist auch der "Startwinkel" für \(~C~\). Der halbe Innenwinkel bei \(~M~\) für \(~C~\) beträgt \(~90°-\alpha/2-\tau_1 = \beta/2-\tau_1~\). Damit ergibt sich, bei welchem Winkel \(~t=\tau_2~\) der Kreisbogen \(~C~\) beim Übergang \(~C - K_2~\) endet: \(~\tau_1+2~(\beta/2-\tau_1)~\). Also gilt: \[\textbf{(11)}~~~\tau_2= \beta - \tau_1\] Berechnung von \(~M~\) mit (9): \(~~~~~x_M+R~\text{sin}~\tau_1 = x_1(L)~~~~~~~~~y_M-R~\text{cos}~\tau_1 = y_1(L)\) \[\textbf{(12)}~~~~~~\rightarrow~~~x_M = x_1(L)-R~\text{sin}~\tau_1~~~~~~~~~y_M = y_1(L)+R~\text{cos}~\tau_1\] \(\textbf{(13)}~~~\)Fußpunkt von \(~G_2:~~v=x_M+y_M ~\text{cot}~\alpha/2\) \(K_2~\) erhält man durch Spiegelung (*, s.u.) von \(~K_1~\) an der Winkelhalbierenden von \(~\alpha~\): \[\textbf{(14)}~~~K_2~:~~(x_2(l),~y_2(l)) = ((x_1(l)-v)~\text{cos}~\alpha - y_1(l)~\text{sin}~\alpha+v,~-(x_1(l)-v)~\text{sin}~\alpha - y_1(l)~\text{cos}~\alpha)~~~~~~~l \in (0,~L)\] Mit (13) erhält man die Gleichung der zweiten Geraden: \[\textbf{(15)}~~~G_2~:~~y = (x-v)~\text{tan}~\beta~~~~~~~x \ge x_2(L)\] |
|
Zu (*): Spiegelung eines Punktes \((x,~y)\) an der Geraden durch \((x_0,~y_0)\) mit Steigungswinkel \(~\gamma~\): \[\left( \begin{array}{c} x_{\text{gespiegelt}}\\ y_{\text{gespiegelt}}\\ \end{array} \right) = \left( \begin{array}{cc} \text{cos}~2~\gamma & \text{sin}~2~\gamma\\ \text{sin}~2~\gamma & -\text{cos}~2~\gamma\\ \end{array} \right)\cdot \left( \begin{array}{c} x-x_0\\ y-y_0\\ \end{array} \right)+ \left( \begin{array}{c} x_0\\ y_0\\ \end{array} \right) \] In (14) ist \(~\gamma = 180° - \alpha/2~\) und \[\left( \begin{array}{c} x\\ y\\ \end{array} \right)= \left( \begin{array}{c} x_1(l)\\ y_1(l)\\ \end{array} \right),~~~ \left( \begin{array}{c} x_{\text{gespiegelt}}\\ y_{\text{gespiegelt}}\\ \end{array} \right)= \left( \begin{array}{c} x_2(l)\\ y_2(l)\\ \end{array} \right)~~~\text{und}~~~ \left( \begin{array}{c} x_0\\ y_0\\ \end{array} \right) = \left( \begin{array}{c} v\\ 0\\ \end{array} \right) \] |
|
Trassenführung Man berechnet zuerst \(~K_1,~\tau_{i~},~M~\) und \(~v~\) mit (8), (10), (11), (12), (13). Mit (8), (9), (14), (15) hat man dann alle Angaben, um die Trasse zeichnen und im Gelände abstecken zu können: \[G_1~:~~y = 0~~~~~~~x \le 0\] \[K_1~:~~(x_1(l),~y_1(l))~~~~~~~l \in (0,~L)\] \[C~:~~(x_c(t),~y_c(t))~~~~~~~t \in [~\tau_1,~\tau_2~]\] \(K_2~:~~(x_2(l),~y_2(l))~~~~~~~l \in (0,~L)~~~\)(eigentlich\(~l\in (L,~0)~~\)wegen der Durchlaufrichtung) \[G_2~:~~y = (x-v)~\text{tan}~\beta~~~~~~~x \ge x_2(L)\] |
|
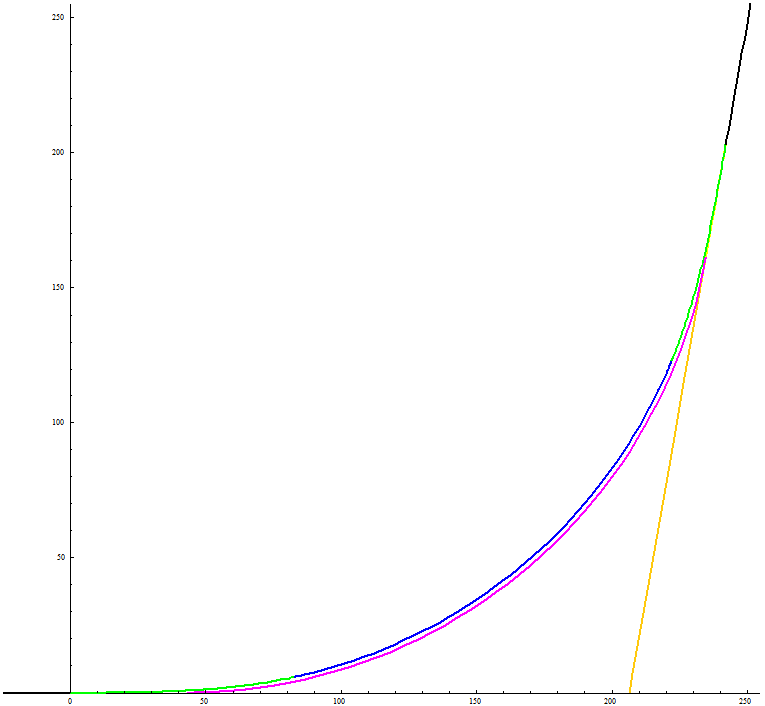
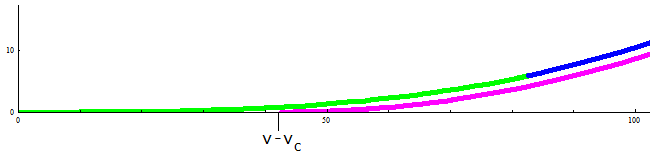
Beispiel Vorgegeben sind \(~\alpha=100°,~R=195,~L=83~\); diese Werte liegen den Graphiken in den Bildern 1, 4 und 5 zugrunde. Die Längenmaße kann man sich anschaulich als in Metern gemessen vorstellen. Im Folgenden sind die Gleichungen nicht exakt, sondern mit Rundungsfehlern behaftet. \[G_1~:~~y = 0~~~~~~~x \le 0\] \[~~~~~~~a = 127,2203\] \[K_1~:~~(x,~y)=(x_1(l),~y_1(l)) = 225,4921\cdot (f_c(0,004435\cdot l),~f_s(0,004435\cdot l))~~~~~~~l \in (0,~83)\] \[~~~~~~~\tau_1=12,1937°~~~~~~~\tau_2 = 67,8063°\] \[~~~~~~~M=(x_M,~y_M)=(41,4374,~~196,4696)\] \[~~~~~~~v=206,2950\] \[C~:~~(x,~y)=(41,4374+195~\text{sin}~t,~196,4696-195~\text{cos}~t)~~~~~~~t \in [~12,1937°,~67,8063°]\] \(K_2~:~~(x,~y) = (x_2(l),~y_2(l)) = (-0,1736 \cdot x_1(l) - 0,9848 \cdot y_1(l) + 242,1178,~~-0,9848 \cdot x_1(l) + 0,1736 \cdot y_1(l) + 203,1609)~~~~~~~l \in (0,~83)~~~\) (eigentlich\(~l\in (83,~0)~~\)wegen der Durchlaufrichtung) \[G_2~:~~y = 5,6713~x-1169,9571~~~~~~~x \ge 242,1178\] \(~~~~~~~\)Öffnungswinkel für \(~C~\) (bei \(~M~\)) :\(~~~~\tau_2 - \tau_1~=~55,6126°\) \(~~~~~~~\)Übergangspunkte zwischen den Kurvenstücken mit Steigungswinkeln: \[~~~~~~~G_1 - K_1~~~~~(0,~0)~~~~~0°\] \[~~~~~~~K_1 - C~~~~~~~(82,6249,~~5,8690)~~~~~12,1937°\] \[~~~~~~~C - K_2~~~~~~~(221,9903,~~122,8105)~~~~~67,8063°\] \[~~~~~~~K_2 - G_2~~~~~(242,1178,~~203,1656)~~~~~80°\] \(~~~~~~~\)Start- und Endpunkt der Kurve ohne Klothoiden, aber im selben Koordinatensystem; mit Steigungswinkeln: \[~~~~~~~(42,6706,~~0)~~~~~0°~~~~~~~~~~~(234,7081,~~161,1386)~~~~~80°\] Potenzreihen für die Klothoide: \[x(l)=\sum_{n=0}^\infty (-1)^n~\frac{l^{4n+1}}{(2n)!~(4n+1)~1.047.816.900^n}\] \[y(l)=\frac{1}{32.370} \cdot \sum_{n=0}^\infty (-1)^n~\frac{l^{4n+3}}{(2n+1)!~(4n+3)~1.047.816.900^n}\] Die ersten drei Summanden reichen aus, um die Klothoide mit hoher Genauigkeit zu berechnen. |
Stand 2023-03-02
Inhalt Blog | voriger Eintrag | nächster Eintrag
Manfred Börgens | Zur Leitseite